 |
\begin{figure}[H]
\begin{center}
\unitlength=4pt
\begin{picture}(60, 30)(-10,-3)
\gasset{Nw=5,Nh=5,Nmr=2.5,curvedepth=0}
\thinlines
\node[Nmarks=i,iangle=180](A1)(-10,17){$1$}
\node(A2)(10,17){$2$}
\node(A3)(0,0){$3$}
\drawloop(A2){$b$}
\drawedge(A1,A2){$a$}
\drawedge(A2,A3){$b$}
\drawedge(A3,A1){$a$}
\node[Nmarks=f,fangle=90](A4)(30,17){$4$}
\node[Nmarks=f,fangle=90](A5)(50,17){$5$}
\drawedge(A2,A4){$a$}
\gasset{curvedepth=-5}
\drawedge(A3,A4){$a$}
\gasset{curvedepth=5}
\drawedge(A4,A5){$a$}
\drawedge(A5,A4){$a$}
\end{picture}
\end{center}
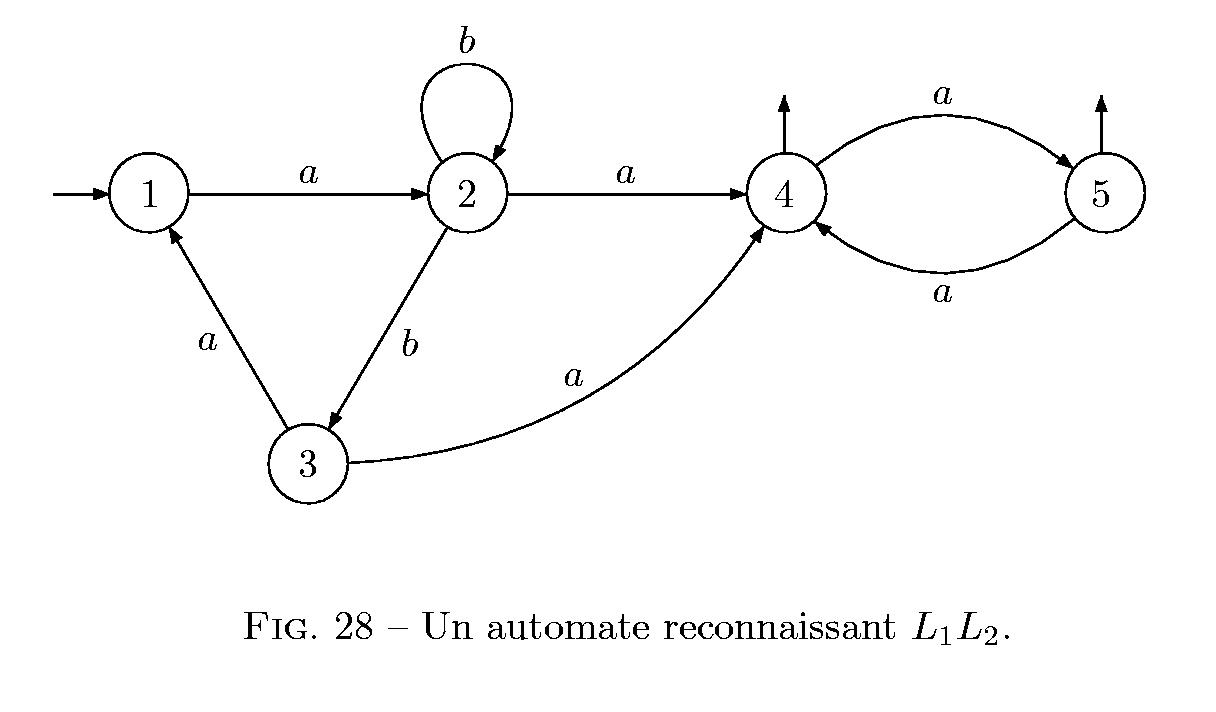
\caption{Un automate reconnaissant $L_1L_2$.}
\end{figure}
|
[Page précédente | index | Page suivante]