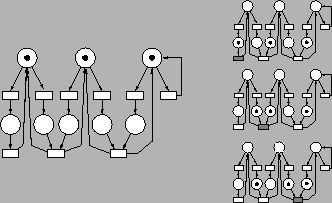
Un réseau de Petri est un graphe orienté
![]() avec deux sortes de noeuds : les places
(représentées par des cercles) et les transitions
(représentées par des rectangles). Un exemple est donné en
figure
avec deux sortes de noeuds : les places
(représentées par des cercles) et les transitions
(représentées par des rectangles). Un exemple est donné en
figure ![]() . Si on note
. Si on note ![]() l'ensemble des places
et
l'ensemble des places
et ![]() l'ensemble des transitions, on a donc
l'ensemble des transitions, on a donc
![]() . Les arcs relient les places aux transitions et
vice-versa, mais il n'y a jamais un arc entre deux noeuds de même
nature.
. Les arcs relient les places aux transitions et
vice-versa, mais il n'y a jamais un arc entre deux noeuds de même
nature.
Des jetons (représentés par des petits disques sur la
figure ![]() ) circulent dans le graphe de la manière
suivante. On se donne une application
) circulent dans le graphe de la manière
suivante. On se donne une application
![]() appelée marquage qui reprsente le nombre de jetons dans chaque
place. On dit qu'une transition
appelée marquage qui reprsente le nombre de jetons dans chaque
place. On dit qu'une transition
![]() est tirable ou
franchissable si toute place en amont de
est tirable ou
franchissable si toute place en amont de ![]() a au moins un
jeton. Quand on tire une transition, on fait disparaître
un jeton de chaque place en amont et on en fait apparaître un
dans chaque place en aval.
a au moins un
jeton. Quand on tire une transition, on fait disparaître
un jeton de chaque place en amont et on en fait apparaître un
dans chaque place en aval.
Une des grandes questions face à un réseau de Petri est de savoir si celui-ci est vivant, c'est-à-dire si quelle que soit la façon de tirer les transitions, le système ne se bloque jamais.
Une autre notion importante pour un réseau de Petri est d'être borné, c'est-à-dire que le nombre de jetons par place reste majoré quelle que soit l'évolution du système.
On s'intéresse à une sous-classe des réseaux de Petri vivants
et bornés. On suppose qu'une des transitions tombe en panne et on
veut alors savoir si le système reste vivant ou s'il se bloque et
dans quel état (voir figure ![]() ).
).
La définition précédemment donnée d'un réseau de Petri n'est pas sans rappeler les IPC de System V de type sémaphore. Il s'agira pour ce TER de simuler des réseaux de Petri grâce à cette technique, puis de simuler une panne et de regarder si le système reste vivant de trois façons différentes :